Studie
Trotz Digitalisierung: Schulbücher bleiben wichtig
91 % der Lehrkräfte verwenden regelmäßig Schulbücher

Wissenschaft entdecken - Einblicke, Hintergründe, Perspektiven
Die Produktion lädt zu einer faszinierenden Reise in die Welt der Wissenschaft ein. Die Filme vermitteln grundlegende Kenntnisse und zeigen, wie die Wissenschaft unser Leben beeinflusst und verändert.
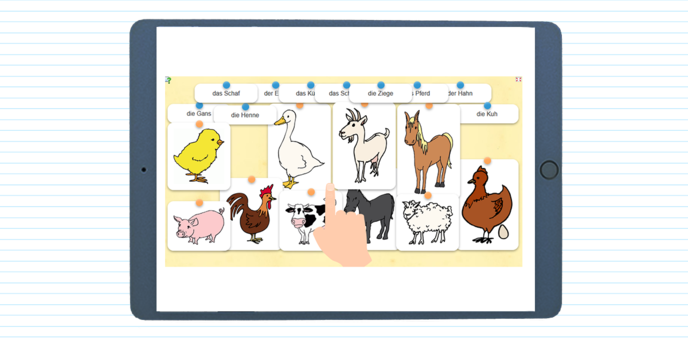
Wir haben den Dienstag zum Toolstag ernannt. Diese Sammlung an Webanwendungen und Online-Werkzeugen für den Unterricht gibt es hier in unserer Datenbank.

Wissen wir wirklich, was unsere Kinder auf TikTok, Instagram, Snapchat und Co sehen? Ein fesselnder Vortrag von Silke Müller.
Jugendliche und Online-Zivilcourage. Wie kann Online-Aktivismus gelingen? Ein Vortrag von Dr. Ulrike Zartler (Uni Wien).
Ingrid Amon, Expertin für Stimm- und Sprechtechnik, verrät uns, was Lehrerinnen und Lehrer über ihre Stimme wissen sollten!